
Vision Based Distributed Angles-only Navigation in Satellite Swarms (ARTMS)
With Justin Kruger, Prof.D’Amico (Stanford University)
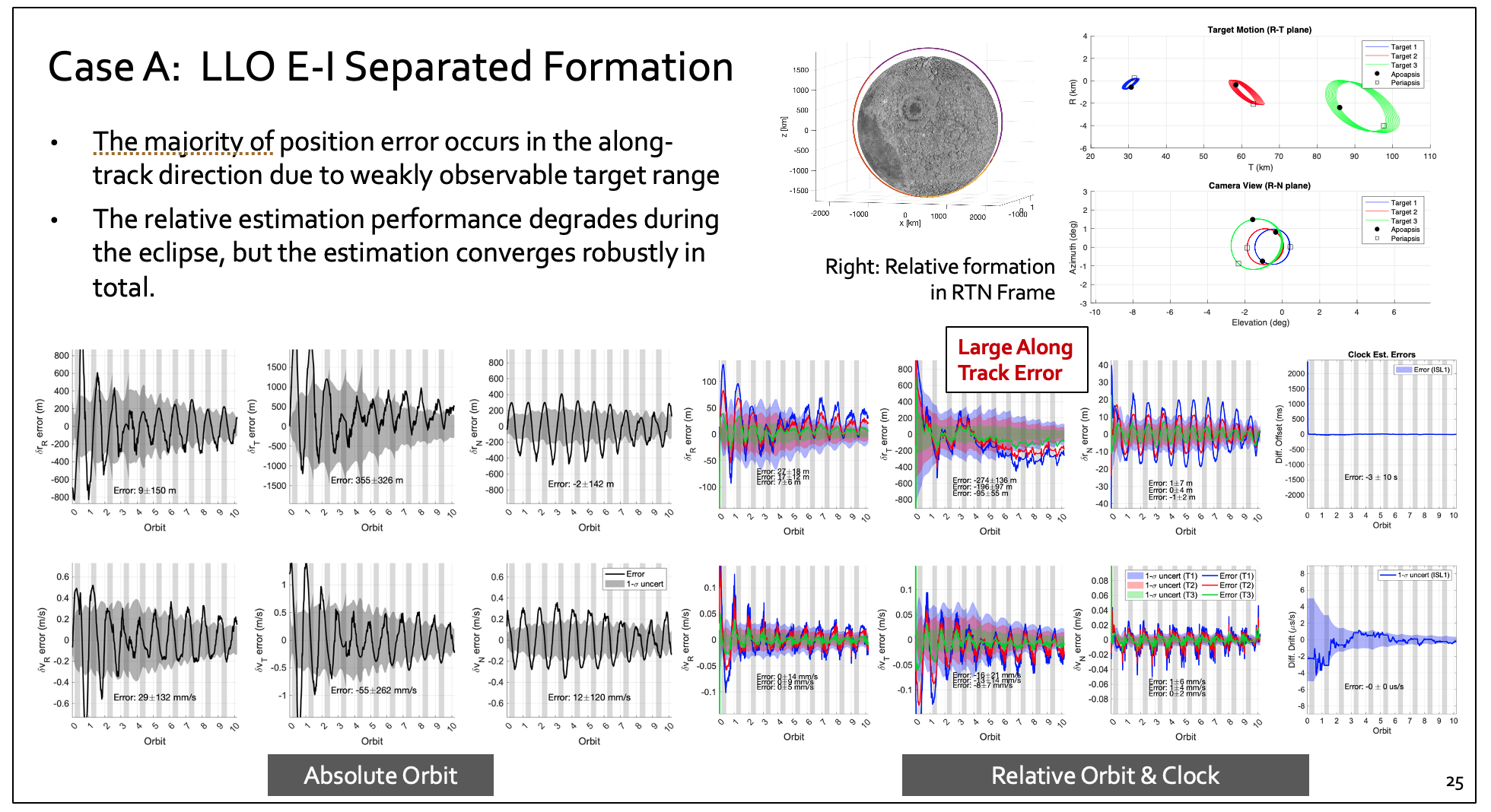
We developed The Absolute and Relative Trajectory Measurement System (ARTMS), an algorithmic framework for autonomous, distributed navigation and timekeeping for spacecraft swarms and constellations using angles-only measurements from onboard cameras. I worked on augmenting ARTMS for lunar navigation, and verified its performance via a star tracker in the loop simulations of swarms and constellations in various lunar orbits.
The performance of ARTMS was demonstrated in LEO in the NASA’s Starling Mission.
Related Publication:
[C8] Iiyama, K., Kruger, J., D’Amico, S., “Autonomous Distributed Angles-Only Navigation and Timekeeping in Lunar Orbit”, Proceedings of the 2022 International Technical Meeting of the Institute of Navigation, 2022 [Slides]