Research Projects
My research interest lies at the intersection of lunar positioning, navigation, and timing (PNT), astrodynamics, spacecraft guidance, navigation, and control (GNC), and multi-agent systems. Below are the lists of research projects that I have worked on at Stanford University, Jet Propulsion Laboratory, and The University of Tokyo.
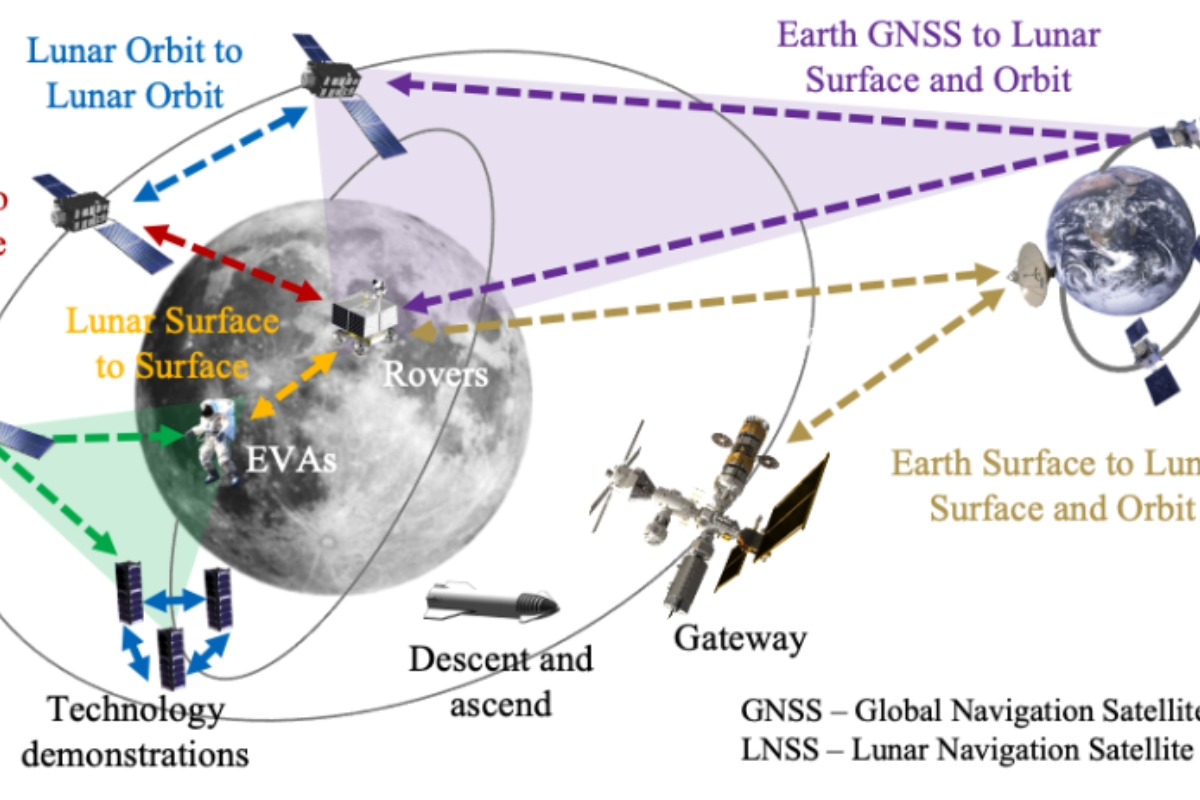
Lunar Positioning, Navigation, and Timing (PNT)
My Ph.D. dissertation is on designing a “Lunar GPS” (is called Lunar Augmented Navigation Service, LANS). My reasearch tackles the unique challenges of designing such systems.

Lunar PNT using GNSS Sidelobe Signals
Utilizing GNSS side lobe signals for autonomous orbit determination and time synchronization of lunar navigation satellites

LunaNet Constellation Design with Staged Development
Jointly optimize lunar navigation satellite constellation and staged development sequence to expand coverage from South pole to global

Cooperative Satellite Clock Fault Detection Using ISRs
Detecting satellite onboard clock jumps without ground monitoring using inter-satellite ranging (ISR) and rigid-graph theory

Almanac and Ephemeris Design for Lunar Satellites
We design compact and precise ephemeris and almanac representations for lunar navigation satellites

Contact Plan and Distributed State Estimation for DTNs
Scheduling links in delay torelant networks (DTNs) to minimize communication delay while improving orbit determination
LuPNT: Open Source Simulator for Lunar PNT
Open-source simulator development in C++ and Python that suports wide range of lunar PNT simulations
Other Research Projects
Before and during my Ph.D., I worked with several leading space research groups on projects related to lunar and Martian exploration:
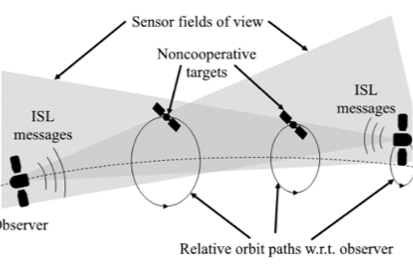
Vision Based Distributed Angles-only Navigation in Satellite Swarms (ARTMS)
Angles-only swarm navigation in lunar orbit using startracker images. With Space Rendezvous Lab (SLAB) at Stanford University.
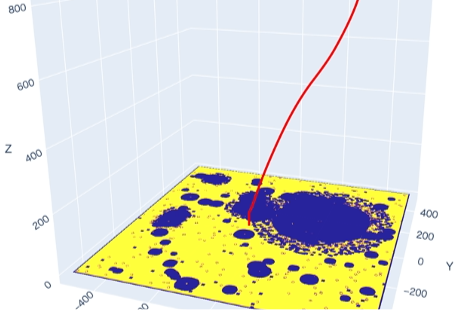
Landing Site Selection and Divert Maneuver Planning with Reinforcement Learning
Optimize landing trajectory that diverts to a safe landing site using RL. With Space Systems Optimization Group (SSOG) at Georgia Tech.

Design and Orbit Determination of Future Mars PNT + Relay Constellation
Designing a Mars PNT + relay constellation and autonomous orbit determination framework using inter-satellite links. With Group 332H at JPL.
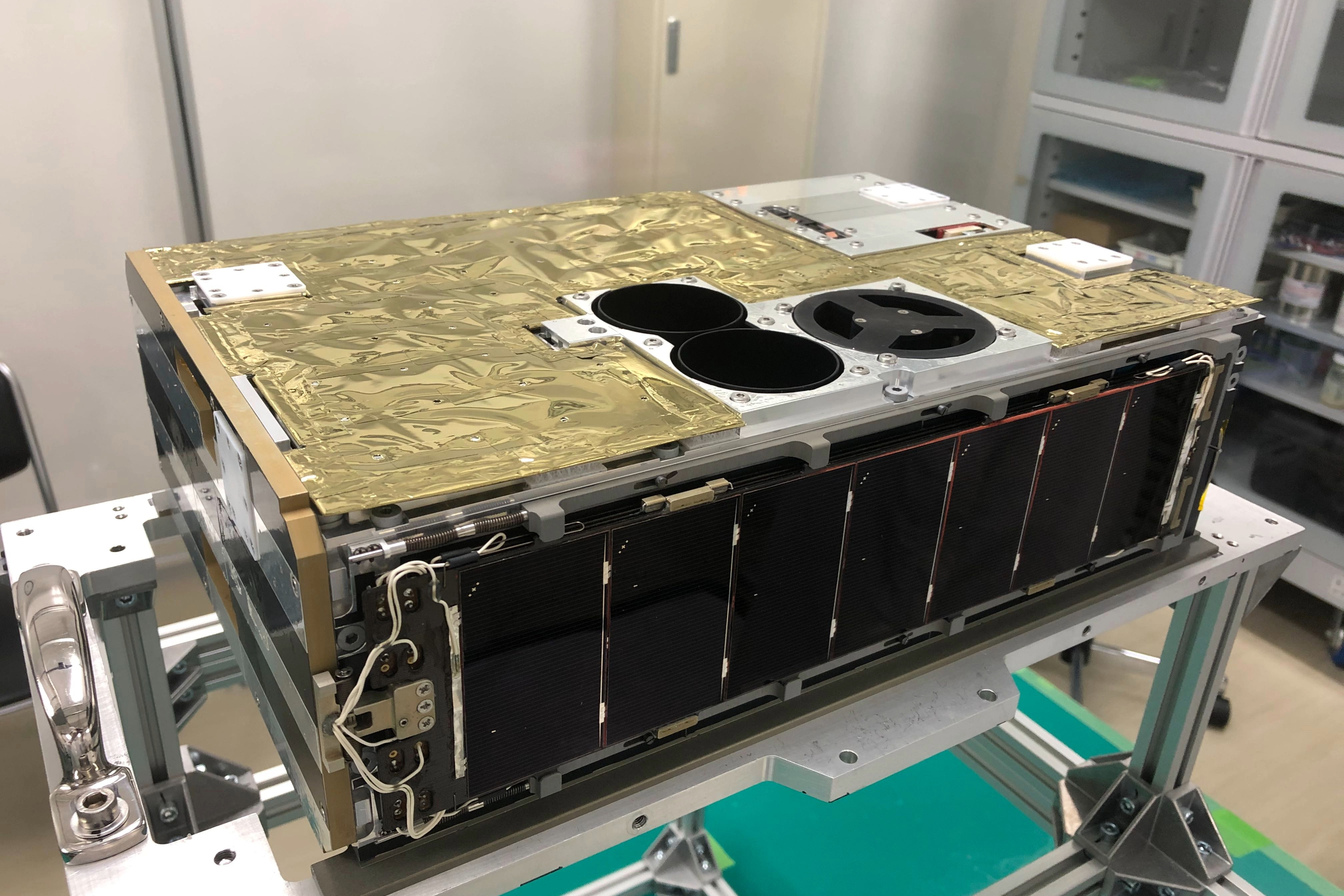
EQUULEUS
A 6U lunar small satellite that achieved succesfull lunar flyby with water based propulsion.

Lunar Autonomy Challenge
Won top prize as NAV LAB team on the Lunar Autonomy Challenge, hosted by NASA and APL.